
我们时常感叹好莱坞大片中以假乱真的特效带给自己的震撼,也时常赞叹特斯拉自动驾驶技术日益精进带给乘车人的踏实感,还时常为Meta冲击《头号玩家》般超现实虚拟环境融入生活,并不断取得突破的AR技术倍感惊叹……而这些看似毫无关联,却又同样极大程度上推动世界科技进程的技术,都基于同一个工作原理的运用:相机标定。


也许你有所耳闻,也许你从未听过,那今天,咱们就一起从专业的角度,去剖析这个运用到无数领域,带给我们无数惊喜的“相机标定”到底是什么!!!
Camera calibration
什么是“相机标定”?
官方百科解释:在图像测量过程以及机器视觉应用中,为确定空间物体“表面某点的位置”与其在“图像中对应点”的关系,必须建立相机成像的几何模型,求解几何模型相关参数的过程就称之为相机标定。
简单来讲就是:我们生活的场景是三维的、立体的,相机拍摄出来的东西是二维的、平面的。二维相较于三维来说,缺少了距离/深度等重要信息,要想从二维的图片当中获取物体原本在三维当中的位置和形态,就需要通过一系列的复杂算法去达到这个目的,这个算法的整体过程就叫相机标定。
Realize
如何实现“相机标定”?
说到相机标定,我们透过一个例子去讲述一下。
“人孔成像”
涉及到五个东西:人(本身),孔,光线,墙,人像。
一个人站着,光线从孔中经过,把人呈倒立形态照射在墙上。而照射在墙上的人像,它的大小,则由墙与孔的距离决定。
如果说“人”身处在真实世界/三维世界中,在光线的照映下,通过“孔”的映射,出现在“墙”上/二维世界,形成“人像”,我们如何通过“墙”上的“人像”去得知“人”的真正形态/三维形态。

*人孔成像·模型
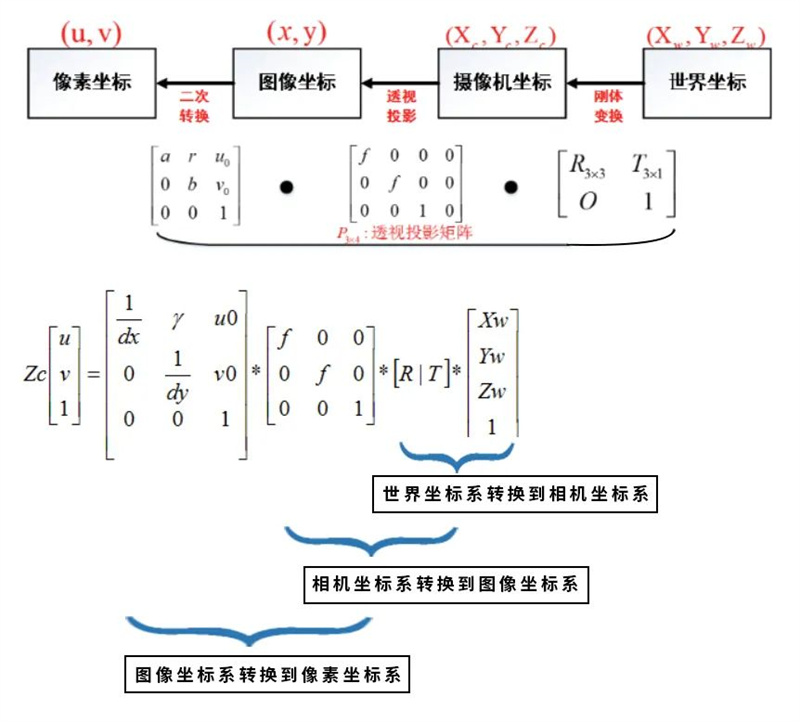
在相机标定中,用了“四个坐标系”:世界坐标系Ow(Xw,Yw,Zw)、相机坐标系Oc(Xc,Yc,Zc)、图像坐标系o(x,y)、像素坐标系Ouv(u,v),加以精钻细研的科学算法,从而得出二维世界与三维世界中的关系,即【像素坐标系】与【世界坐标系】的关系。

*相机标定·图示
想从【世界坐标系】精准到【像素坐标系】,就成了四个坐标系之间的相互换算,这其中涉及到比较专业的知识,我们还是继续以“人孔成像”的例子去阐述,从浅显的方面讲一下:如果以人站着的位置(脚根)为【世界坐标系】原点,那么“人”到“孔”的位置可以通过平移和旋转实现方向和距离的一致。我们以R表示旋转,以T表示平移;从“孔”到“人像”的距离即Z,在成像中称为“焦距”,用f表示具体距离/焦距。
最终,通过层层转化,从【世界坐标系】到【像素坐标系】的关系为:
那从【世界坐标系】到【像素坐标系】的过程
就这么轻易完成了?
当然不是!!!
在“人孔成像”过程中,由于“孔”和“人”的大小关系/远近关系;“人”通过“孔”形成的“人像”往往会有些许变形,我们称为“畸变”。但“孔”往往是中心对称的,所以“畸变”也多呈径向对称,我们称为“径向畸变”,“径向畸变”一般分为两种:枕形和桶形。

*径向畸变·图示
而在成像过程中的组件,如果透镜和成像的平面没有严格平行,则会引起“切向畸变”。

*切向畸变·图示
既然有“畸变”,就有“矫正”来完成还原。
通过相机标定,我们可以从平面中还原物体本真的三维形态,可以精准地得知平面中物体在三维空间中的位置信息,可以让三维的物体以二维存在的同时,不丢失作为三维物体所具备的方方面面……从而帮助我们在动作捕捉、三维建模、定位导航等各个场景提供技术支持。
Scenarios
“相机标定”的场景应用


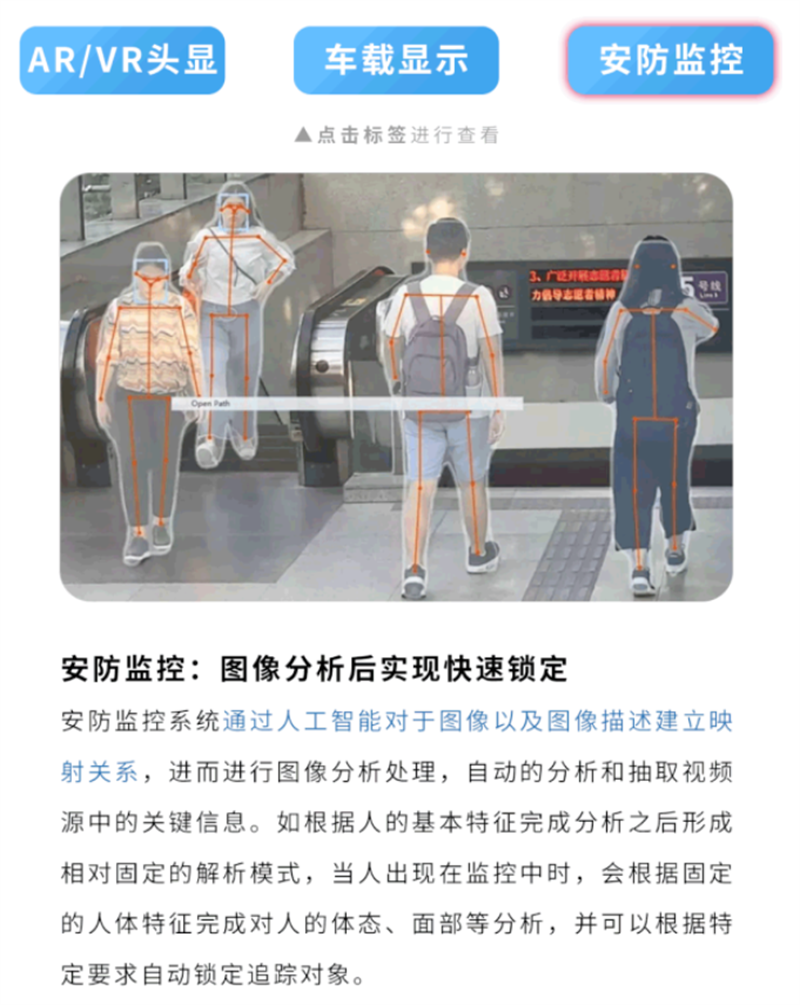
除此之外,还有很多场景都会用到这项技术,因为它的应用范围过于广泛,更多的就需要各位在生活当中去自行发现了!!!
Cases
第六镜科技的“相机标定”应用
作为致力于“以AI技术赋能传统行业数字化转型”的第六镜科技,依靠自研算法+软硬件一体化,已和多家知名企业展开合作,完成了“热态钢轨缺陷检测”“数字化煤仓”“炉辊结瘤检测仪”等多个解决方案,帮助企业在发展过程中极大地提高了生产效率,而“相机标定”技术在其中的应用起到了很大的作用。

*第六镜科技“热态钢轨”·三维图片1

*第六镜科技“热态钢轨”·三维图片2

*第六镜科技“热态钢轨”·三维图片1
比如,与邯钢集团的“热态钢轨缺陷检测”合作中,针对整个流程的实现,第六镜科技编写了“输入”“输出”的多条算法运用到相机标定上,实现对“热态钢轨缺陷检测”的最优输出:在生成标定板轮廓模型后输入采集轮廓,在算法的驱动下,相机会对各个视角轮廓与标准模型进行仿射变换配准,从而得到标定结果对数据进行拼接和矫正,再拟合椭圆轮廓,求解半径,和圆柱间的距离,评估最优标定,结束后输出最优标定结果。


*第六镜科技“数字化煤仓”·展示
再有,与旭阳集团联合的“数字化煤仓”项目中,第六镜科技结合激光扫描和斗轮机三维定位技术,对煤仓进行三维成像,形成分层、分区的存储数据,并根据堆取料登记的时间和区域,为后续燃煤进场数据、采制化数据导入提供依据。
……
随着科技在实际中的运用占比不断提高,传统行业已逐步迈入新的征程,力求在人力成本、时间成本、安全性等多个方面寻求更大突破,从传统方式真正实现全“智能化”发展。第六镜科技也将以不断进取的姿态,携手传统行业在“智慧化”的道路上,留下更多辉煌。
注:*本文(含图片)均为转载,文章版权归原作者所有,若有侵权请联系删除。


服务热线
微信客服


